Development
The first step is to install labgrid into a local virtualenv.
Installation
Clone the git repository:
git clone https://github.com/labgrid-project/labgrid && cd labgrid
Create and activate a virtualenv for labgrid:
virtualenv -p python3 venv
source venv/bin/activate
pip install --upgrade pip
Install required dependencies:
sudo apt install python3-dev libow-dev
Install labgrid with development dependencies into the virtualenv in editable mode:
pip install -e ".[dev]"
Tests can now be run via:
python -m pytest
Writing a Driver
To develop a new driver for labgrid, you need to decide which protocol to implement, or implement your own protocol. If you are unsure about a new protocol’s API, just use the driver directly from the client code, as deciding on a good API will be much easier when another similar driver is added.
labgrid uses the attrs library for internal classes. First of all import attr, the protocol and the common driver class into your new driver file.
import attr
from labgrid.driver import Driver
from labgrid.protocol import ConsoleProtocol
Next, define your new class and list the protocols as subclasses of the new driver class. Try to avoid subclassing existing other drivers, as this limits the flexibility provided by connecting drivers and resources on a given target at runtime.
import attr
from labgrid.driver import Driver
from labgrid.protocol import ConsoleProtocol
@attr.s(eq=False)
class ExampleDriver(Driver, ConsoleProtocol):
pass
The ConsoleExpectMixin is a mixin class to add expect functionality to any
class supporting the ConsoleProtocol and has to be the first item in the
subclass list.
Using the mixin class allows sharing common code, which would otherwise need to
be added into multiple drivers.
import attr
from labgrid.driver import Driver
from labgrid.driver.consoleexpectmixin import ConsoleExpectMixin
from labgrid.protocol import ConsoleProtocol
@attr.s(eq=False)
class ExampleDriver(ConsoleExpectMixin, Driver, ConsoleProtocol):
pass
Additionally the driver needs to be registered with the target_factory
and provide a bindings dictionary, so that the Target can resolve
dependencies on other drivers or resources.
import attr
from labgrid.factory import target_factory
from labgrid.driver import Driver
from labgrid.driver.consoleexpectmixin import ConsoleExpectMixin
from labgrid.protocol import ConsoleProtocol
@target_factory.reg_driver
@attr.s(eq=False)
class ExampleDriver(ConsoleExpectMixin, Driver, ConsoleProtocol):
bindings = { "port": "SerialPort" }
The listed resource SerialPort will be bound to self.port,
making it usable in the class.
Checks are performed that the target which the driver binds to has a SerialPort,
otherwise an error will be raised.
If your driver can support alternative resources, you can use a set of classes instead of a single class:
bindings = { "port": {"SerialPort", "NetworkSerialPort"} }
Optional bindings can be declared by including None in the set:
bindings = { "port": {"SerialPort", "NetworkSerialPort", None} }
If you need to do something during instantiation, you need to add a
__attrs_post_init__ method (instead of the usual __init__ used
for non-attr-classes).
The minimum requirement is a call to super().__attrs_post_init__().
import attr
from labgrid.factory import target_factory
from labgrid.driver import Driver
from labgrid.driver.consoleexpectmixin import ConsoleExpectMixin
from labgrid.protocol import ConsoleProtocol
@target_factory.reg_driver
@attr.s(eq=False)
class ExampleDriver(ConsoleExpectMixin, Driver, ConsoleProtocol):
bindings = { "port": "SerialPort" }
def __attrs_post_init__(self):
super().__attrs_post_init__()
All that’s left now is to implement the functionality described by the used protocol, by using the API of the bound drivers and resources.
Writing a Resource
To add a new resource to labgrid, we import attr into our new resource file.
Additionally we need the target_factory and the common Resource class.
import attr
from labgrid.factory import target_factory
from labgrid.resource import Resource
Next we add our own resource with the Resource parent class and
register it with the target_factory.
import attr
from labgrid.factory import target_factory
from labgrid.resource import Resource
@target_factory.reg_resource
@attr.s(eq=False)
class ExampleResource(Resource):
pass
All that is left now is to add attributes via attr.ib() member
variables.
import attr
from labgrid.factory import target_factory
from labgrid.resource import Resource
@target_factory.reg_resource
@attr.s(eq=False)
class ExampleResource(Resource):
examplevar1 = attr.ib()
examplevar2 = attr.ib()
The attr.ib() style of member definition also supports defaults and
validators, see the attrs documentation.
Writing a Strategy
labgrid offers only basic strategies, for complex use cases a customized strategy is required. Start by creating a strategy skeleton:
import enum
import attr
from labgrid.step import step
from labgrid.strategy import Strategy, StrategyError, never_retry
from labgrid.factory import target_factory
class Status(enum.Enum):
unknown = 0
@target_factory.reg_driver
class MyStrategy(Strategy):
bindings = {
}
status = attr.ib(default=Status.unknown)
@never_retry
@step()
def transition(self, status, *, step):
if not isinstance(status, Status):
status = Status[status]
if status == Status.unknown:
raise StrategyError(f"can not transition to {status}")
elif status == self.status:
step.skip("nothing to do")
return # nothing to do
else:
raise StrategyError(
f"no transition found from {self.status} to {status}"
)
self.status = status
The bindings variable needs to declare the drivers necessary for the
strategy, usually one for power, bootloader and shell.
It is possible to reference drivers via their protocol, e.g.
ConsoleProtocol.
Note that drivers which implement multiple protocols must not be referenced
multiple times via different protocols.
The Status class needs to be extended to cover the states of your strategy,
then for each state an elif entry in the transition() method needs to be
added.
Note
Since infrastructure failures or broken strategies typically cannot recover,
it makes little sense to continue operating with such a strategy after an
error has occurred.
To clearly mark a strategy as unusable after failure (and to avoid cascading
errors in subsequent calls) the strategy’s transition() method (and
optionally its force() method) can be decorated with the
@never_retry decorator.
This decorator causes the strategy to store the encountered exception in its
broken attribute and raise a StrategyError for the original and all
subsequent calls to the decorated methods.
Lets take a look at the builtin BareboxStrategy. The Status enum for the BareboxStrategy:
class Status(enum.Enum):
unknown = 0
off = 1
barebox = 2
shell = 3
defines three custom states and the unknown state as the start point.
These three states are handled in the transition function:
elif status == Status.off:
self.target.deactivate(self.barebox)
self.target.deactivate(self.shell)
self.target.activate(self.power)
self.power.off()
elif status == Status.barebox:
self.transition(Status.off)
# cycle power
self.power.cycle()
# interrupt barebox
self.target.activate(self.barebox)
elif status == Status.shell:
# transition to barebox
self.transition(Status.barebox)
self.barebox.boot("")
self.barebox.await_boot()
self.target.activate(self.shell)
Here, the barebox state simply cycles the board and activates the driver,
while the shell state uses the barebox state to cycle the board and then boot
the linux kernel.
The off state switches the power off.
Oftentimes it is also necessary to wait for specific resources to appear before
a transition can be continued. The await_resources() function of the target
implements this functionality, it expects a list of resources to wait for and
optionally takes a timeout and whether the resource should be available or
unavailable.
Tips for Writing and Debugging Tests
Live-Reading Console Output
When starting labgrid with --lg-log option, it will dump the input from the
serial driver to a file in specified directory:
$ pytest [OPTIONS] --lg-log=logdir test-dir/
This can help understanding what happened and why it happened.
However, when debugging tests, it might be more helpful to get a live
impression of what is going on.
For this, you can use tail -F to read the content written to the log file
as if you would be connected to the device’s serial console (except that it is
read-only):
$ tail -F logdir/console_main # for the 'main' target
For getting information about timing, the annotate-output command turned
out to be quite helpful.
On Debian it comes with the devscripts package and you can install it
with:
$ sudo apt install devscripts
To use it, run:
$ annotate-output tail -F logdir/console_main
This will print your system time before each line, allowing you to both see relative delays between steps in your tests as well as absolute timing of things happening in your test environment.
Dealing With Kernel Log Verbosity
For testing your Linux system it can be quite annoying if the kernel outputs verbosely to the console you use for testing. Note that a too verbose kernel can break tests as kernel logs will pollute the expected command outputs making it unreadable for labgrid regular expressions.
However, as the shell driver and most of the tests will depend on seeing console output of what is going on during boot, we cannot turn off kernel logging completely.
Note
The labgrid ShellDriver itself attempts to disable console printing by
calling dmesg -n 1 as soon as having a logged-in shell.
However, this may be too late for reliably capturing the initial login and
shell prompt.
A proper point in time for disabling kernel output to the console is when
systemd starts.
To achieve this, make use of the systemd-sysctl.service that uses
/etc/sysctl.d/ to configure kernel parameters.
This way, the kernel log level can be set to ‘error’ by the time of service
execution with a config file like:
$ cat /etc/sysctl.d/20-quiet-printk.conf
kernel.printk = 3
If the initial kernel logging is still too high, one could also reduce this.
But note that for the standard configuration of the labgrid barebox and uboot
drivers, we need to catch the Linux version ... line to detect we
successfully left the bootloader (the bootstring attribute).
This line is only printed when having at least kernel log level 6 (notice)
enabled:
loglevel=6
Graph Strategies
Warning
This feature is experimental and brings much complexity to your project.
GraphStrategies are made for more complex strategies, with multiple, on each other depending, states. A GraphStrategy graph has to be a directed graph with one root state.
Using a GraphStrategy makes only sense if you have board states that are reachable by different ways. In this case GraphStrategies reduce state duplication.
Example
teststrategy.py:
from labgrid.strategy import GraphStrategy
from labgrid.factory import target_factory
@target_factory.reg_driver
class TestStrategy(GraphStrategy):
def state_unknown(self):
pass
@GraphStrategy.depends('unknown')
def state_boot_via_nand(self):
pass
@GraphStrategy.depends('unknown')
def state_boot_via_nfs(self):
pass
@GraphStrategy.depends('boot_via_nand', 'boot_via_nfs')
def state_barebox(self):
pass
@GraphStrategy.depends('barebox')
def state_linux_shell(self):
pass
test.yaml:
targets:
main:
resources: {}
drivers:
TestStrategy: {}
imports:
- teststrategy.py
The class can also render a graph as PNG (using GraphViz):
>>> from labgrid.environment import Environment
>>> env = Environment('test.yaml')
>>> strategy = env.get_target().get_driver('Strategy')
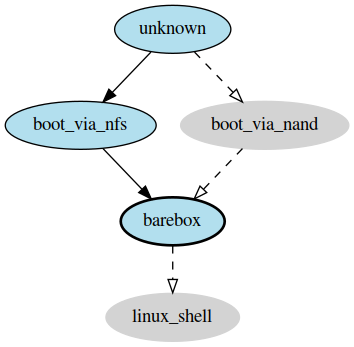
>>> strategy.transition('barebox', via=['boot_via_nfs'])
['unknown', 'boot_via_nfs', 'barebox']
>>> strategy.graph.render("teststrategy-via-nfs")
'teststrategy-via-nfs.png'
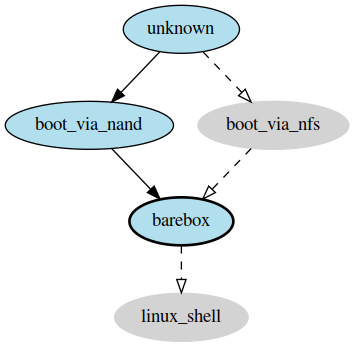
>>> strategy.transition('barebox', via=['boot_via_nand'])
['unknown', 'boot_via_nand', 'barebox']
>>> strategy.graph.render("teststrategy-via-nand")
'teststrategy-via-nand.png'
TestStrategy transitioned to ‘barebox’ via ‘boot_via_nfs’
TestStrategy transitioned to ‘barebox’ via ‘boot_via_nand’
State
Every graph node describes a board state and how to reach it, A state
has to be a class method following this prototype:
def state_$STATENAME(self):. A state may not call transition() in its
state definition.
Dependency
Every state, but the root state, can depend on other States, If a state has multiple dependencies, not all of them, but one, have to be reached before running the current state. When no via is used during a transition the order of the given dependencies decides which one gets called, where the first one has the highest priority and the last one the lowest. Dependencies are represented by graph edges.
Root State
Every GraphStrategy has to has to define exactly one root state. The root state defines the start of the graph and therefore the start of every transition. A state becomes a root state if it has no dependencies.
Transition
A transition describes a path, or a part of a path, through a GraphStrategy
graph.
Every State in the graph has a auto generated default path starting from the
root state.
So using the given example, the GraphStrategy would call the states unknown,
boot_via_nand, barebox, and linux_shell in this order if
transition('linux_shell') would be called.
The GraphStrategy would prefer boot_via_nand over boot_via_nfs because
boot_via_nand is mentioned before boot_via_nfs in the dependencies of
barebox. If you want to reach via boot_via_nfs the call would look like
this: transition('linux_shell', via='boot_via_nfs').
A transition can be incremental. If we trigger a transition with
transition('barebox') first, the states unknown, boot_via_nand and
barebox will be called in this order. If we trigger a transition
transition('linux_shell') afterwards only linux_shell gets called. This
happens because linux_shell is reachable from barebox and the Strategy
holds state of the last walked path.
But there is a catch! The second, incremental path must be fully incremental
to the previous path!
For example: Lets say we reached barebox via boot_via_nfs,
(transition('barebox', via='boot_via_nfs')). If we trigger
transition('linux_shell') afterwards the GraphStrategy would compare the last
path 'unknown', 'boot_via_nfs', 'barebox' with the default path to
linux_shell which would be
'unknown', 'boot_via_nand', 'barebox', 'linux_shell', and decides the path
is not fully incremental and starts over by the root state. If we had given
the second transition boot_via_nfs like in the first transition the paths
had been incremental.
SSHManager
labgrid provides a SSHManager to allow connection reuse with control sockets.
To use the SSHManager in your code, import it from labgrid.util.ssh:
>>> from labgrid.util import sshmanager
you can now request or remove port forwardings:
>>> from labgrid.util import sshmanager
>>> localport = sshmanager.request_forward('localhost', 'somehost', 3000)
>>> sshmanager.remove_forward('localhost', 'somehost', 3000)
or get and put files:
>>> from labgrid.util import sshmanager
>>> sshmanager.put_file('somehost', '/path/to/local/file', '/path/to/remote/file')
Note
The SSHManager will reuse existing Control Sockets and set up a keepalive loop to prevent timeouts of the socket during tests.
ManagedFile
While the SSHManager exposes a lower level interface to use SSH Connections, the ManagedFile provides a higher level interface for file upload to another host. It is meant to be used in conjunction with a remote resource, and store the file on the remote host with the following pattern:
/tmp/labgrid-<username>/<sha256sum>/<filename>
Additionally it provides get_remote_path() to retrieve the complete file path,
to easily employ it for driver implementations.
To use it in conjunction with a Resource and a file:
>>> from labgrid.util.managedfile import ManagedFile
>>> mf = ManagedFile(your_file, your_resource)
>>> mf.sync_to_resource()
>>> path = mf.get_remote_path()
Unless constructed with ManagedFile(..., detect_nfs=False), ManagedFile
employs the following heuristic to check if a file is stored on a NFS share
available both locally and remotely via the same path:
check if GNU coreutils stat(1) with option –format exists on local and remote system
check if inode number, total size and modification timestamp match on local and remote system
If this is the case the actual file transfer in sync_to_resource is
skipped.
ProxyManager
The proxymanager is used to open connections across proxies via an attribute in
the resource. This allows gated testing networks by always using the exporter as
an SSH gateway to proxy the connections using SSH Forwarding. Currently this is
used in the SerialDriver for proxy connections.
Usage:
>>> from labgrid.util.proxy import proxymanager
>>> host, port = proxymanager.get_host_and_port(your_resource)
Contributing
Thank you for thinking about contributing to labgrid! Some different backgrounds and use-cases are essential for making labgrid work well for all users.
The following should help you with submitting your changes, but don’t let these guidelines keep you from opening a pull request. If in doubt, we’d prefer to see the code earlier as a work-in-progress PR and help you with the submission process.
Workflow
Changes should be submitted via a GitHub pull request.
Try to limit each commit to a single conceptual change.
Add a signed-of-by line to your commits according to the Developer’s Certificate of Origin (see below).
Check that the tests still work before submitting the pull request. Also check the CI’s feedback on the pull request after submission.
When adding new drivers or resources, please also add the corresponding documentation and test code.
If your change affects backward compatibility, describe the necessary changes in the commit message and update the examples where needed.
Code
Documentation
Use semantic linefeeds in .rst files.
Building the documentation
When contributing to documentation it’s practical to be able to build it also locally.
virtualenv -p python3 labgrid-venv
source labgrid-venv/bin/activate
pip install --upgrade pip
git clone https://github.com/labgrid-project/labgrid.git
cd labgrid
pip install -e ".[dev]"
cd doc
make html
Once the build is done you can see the results with firefox .build/html/index.html.
If for whatever the reason you need to rebuild everything from scratch, use make SPHINXOPTS="-a -E" html.
Run Tests
$ tox -r
Developer’s Certificate of Origin
labgrid uses the Developer’s Certificate of Origin 1.1 with the same process as used for the Linux kernel:
Developer’s Certificate of Origin 1.1
By making a contribution to this project, I certify that:
The contribution was created in whole or in part by me and I have the right to submit it under the open source license indicated in the file; or
The contribution is based upon previous work that, to the best of my knowledge, is covered under an appropriate open source license and I have the right under that license to submit that work with modifications, whether created in whole or in part by me, under the same open source license (unless I am permitted to submit under a different license), as indicated in the file; or
The contribution was provided directly to me by some other person who certified (a), (b) or (c) and I have not modified it.
I understand and agree that this project and the contribution are public and that a record of the contribution (including all personal information I submit with it, including my sign-off) is maintained indefinitely and may be redistributed consistent with this project or the open source license(s) involved.
Then you just add a line (using git commit -s) saying:
Signed-off-by: Random J Developer <random@developer.example.org>
using your real name (sorry, no pseudonyms or anonymous contributions).
Ideas
Driver Preemption
To allow better handling of unexpected reboots or crashes, inactive Drivers could register callbacks on their providers (for example the BareboxDriver it’s ConsoleProtocol). These callbacks would look for indications that the Target has changed state unexpectedly (by looking for the bootloader startup messages, in this case). The inactive Driver could then cause a preemption and would be activated. The current caller of the originally active driver would be notified via an exception.
Step Tracing
The Step infrastructure already collects timing and nesting information on executed commands, but is currently only used in the pytest plugin or via the standalone StepLogger (or deprecated StepReporter). By writing these events to a file (or sqlite database) as a trace, we can collect data over multiple runs for later analysis. This would become more useful by passing recognized events (stack traces, crashes, …) and benchmark results via the Step infrastructure.
CommandProtocol Support for Background Processes
Currently the CommandProtocol does not support long running processes well. An implementation should start a new process, return a handle and forbid running other processes in the foreground. The handle can be used to retrieve output from a command.